H4T Series Mini 3-Axis 8K Quad-Sensor AI Gimbal Camera
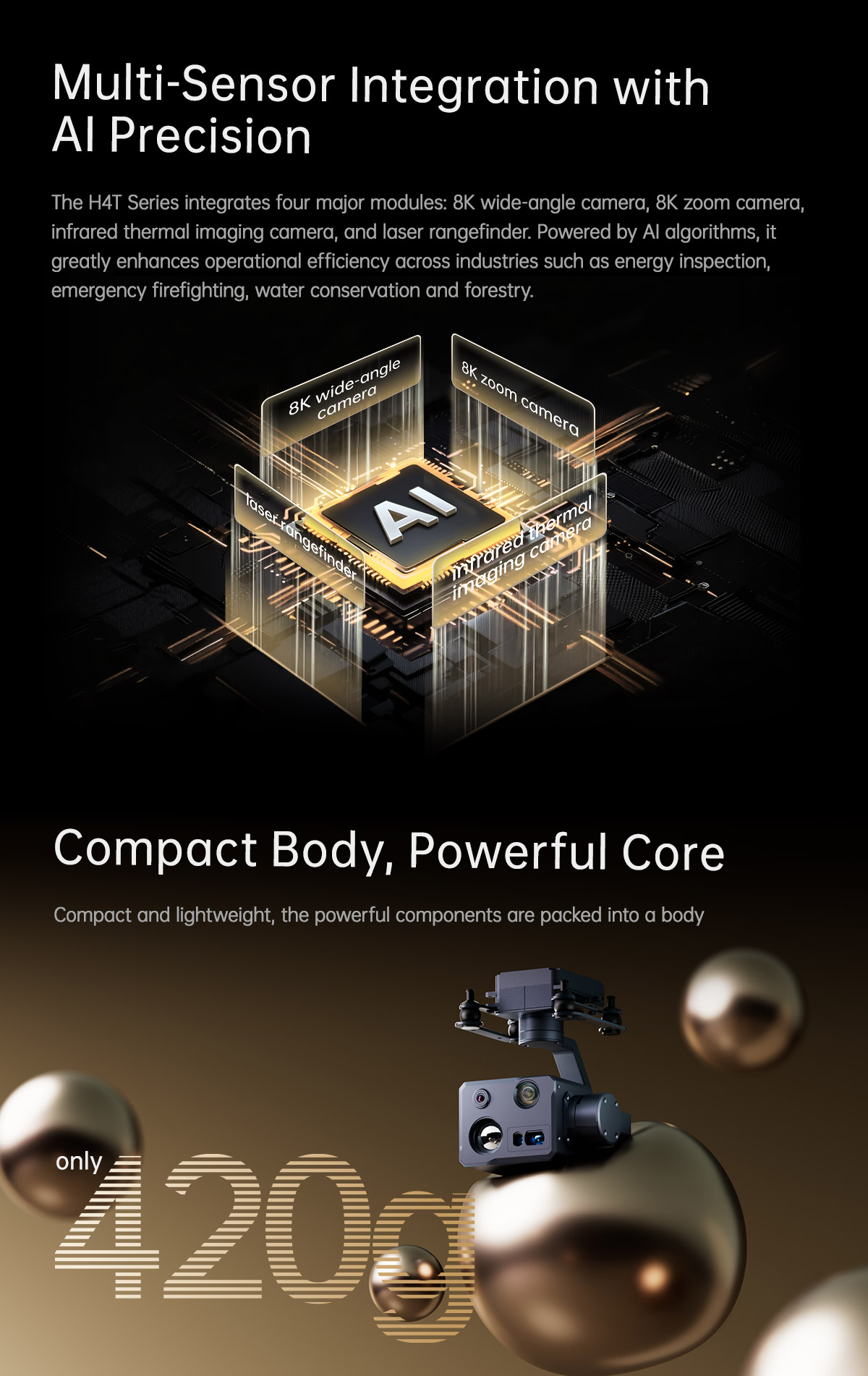
The H4T Series integrates four major modules: 8K wide-angle camera, 8K zoom camera, infrared thermal imaging camera, and laser rangefinder. Powered by AI algorithms, it greatly enhances operational efficiency across industries such as energy inspection, emergency firefighting, water conservation and forestry.
Description
Technical Specifications
| N.W. | 420g |
|---|---|
| Product meas. | 102.5*97.5*124.9mm |
| Input Voltage | 14.8V~25.2V |
| Dynamic current | 1250~1650mA @ 16V |
| Power consumption | Average 20W, Max 26.4W |
| Working environment temp. | -20℃~+50℃ |
| IP rate | IP4X |
| EO camera zoom capability | 10x optical zoom, hybrid zoom 160x |
| Output | IP (RTSP/UDP 720p/1080p@25fps H264/H265) |
| Storage |
TF card 1 (top slot)(Up to 256G,class 10, FAT32 format) TF card 2 (camera slot) (storage capacity within 512G, read and write speed A2 V30) |
| Picture in TF Card |
TF card 1 (top slot): EO 1920*1080, IR 640*512 TF card 2 (camera slot): wide-angle camera 4000*3000, zoom camera 4000*3000 |
| Video in TF Card |
TF card 1 (top slot): 1920×1080 @ 25 fps TF card 2 (camera slot): Wide-angle camera 4K@30fps, Zoom camera 4K@30fps |
| Control method | S.BUS or TTL(either one, default is TTL) / TCP / UDP |
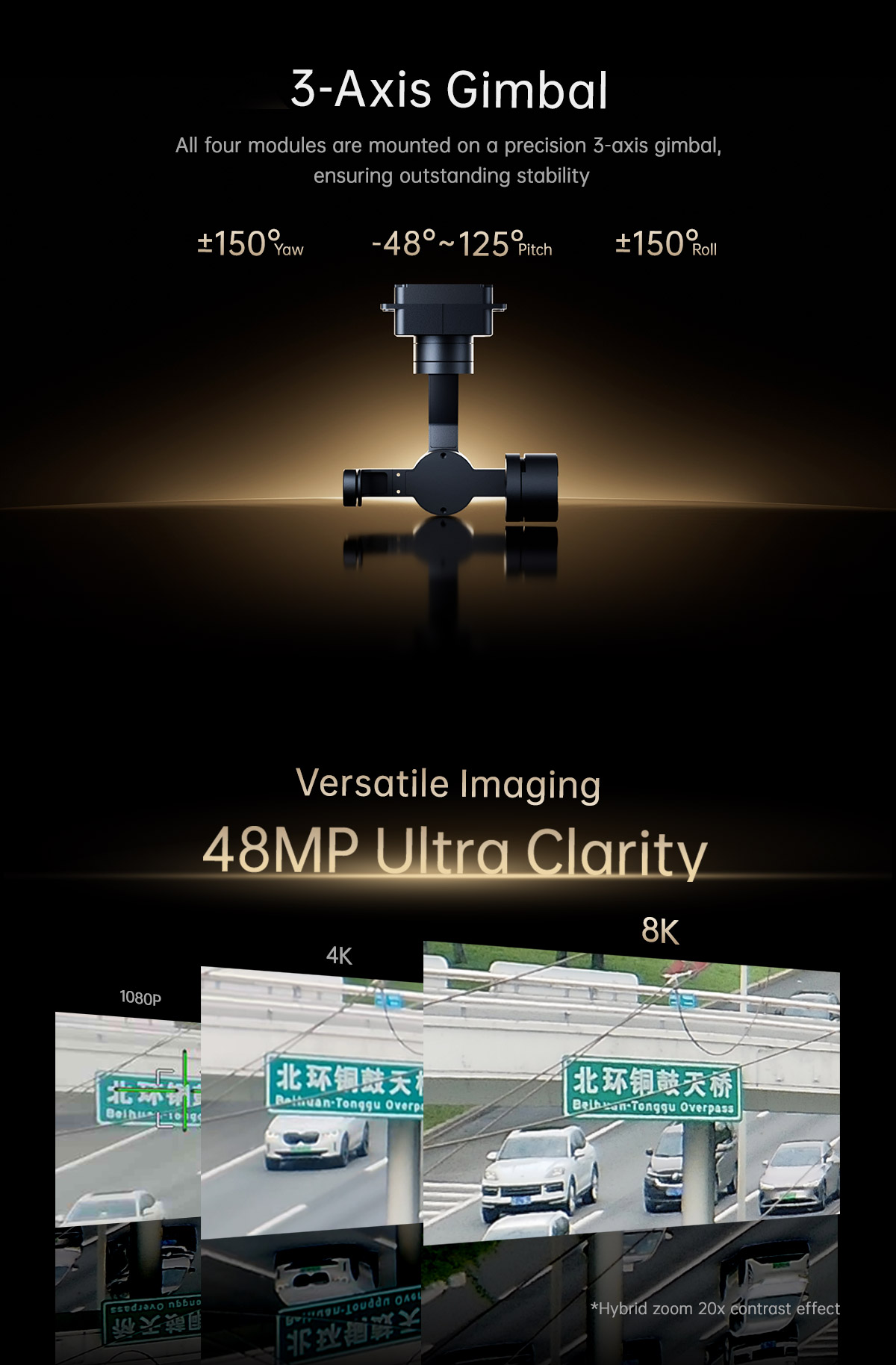
| Mechanical Range | Pitch/Tilt: -65°(Up)~135°(Down), Roll angle:±50°, Yaw/Pan: ±150° |
|---|---|
| Controllable Range | Pitch/Tilt: -45°~125°, Yaw/Pan: ±140° |
| Vibration angle | Pitch/Roll/Yaw: ±0.02° |
| One-key to center | √ |
| Imager Sensor | 1/2″ CMOS (H:6.4mm, V:4.8mm, D:8.0mm) |
|---|---|
| Pixel size | 0.80 µm (H) ×0.80 µm (V) |
| Resolution | 48MP(8000*6000) |
| EFL | 4.49mm |
| Equivalent focal length | 24.29mm |
| Aperture | F2.8 |
| Field of View | D:84° H:70.2° V:54.9° |
| Optical distortion | 2.50% |
| Imager Sensor | 1/2 inch CMOS (H:6.4mm, V:4.8mm, D:8.0mm) |
|---|---|
| Pixel size | 0.80 µm (H) ×0.80 µm (V) |
| Resolution | 48MP(8000*6000) |
| EFL | 15.3~49.7mm±5% |
| Equivalent focal length | 82.77-268.88mm, Aperture F3.7(W)~F4.6(T) |
| Field of View | D: 28.3°(W)~8.9°(T) H: 23.2°(W)~7.2°(T) V: 17.6°(W)~5.4°(T) |
| Optical distortion | 1.6%(Wide)~1.4% (Tele),@∅8mm |
| Focus Length | 25mm |
|---|---|
| Aperture | F1.2 |
| Horizontal FOV | 17.5° |
| Vertical FOV | 14° |
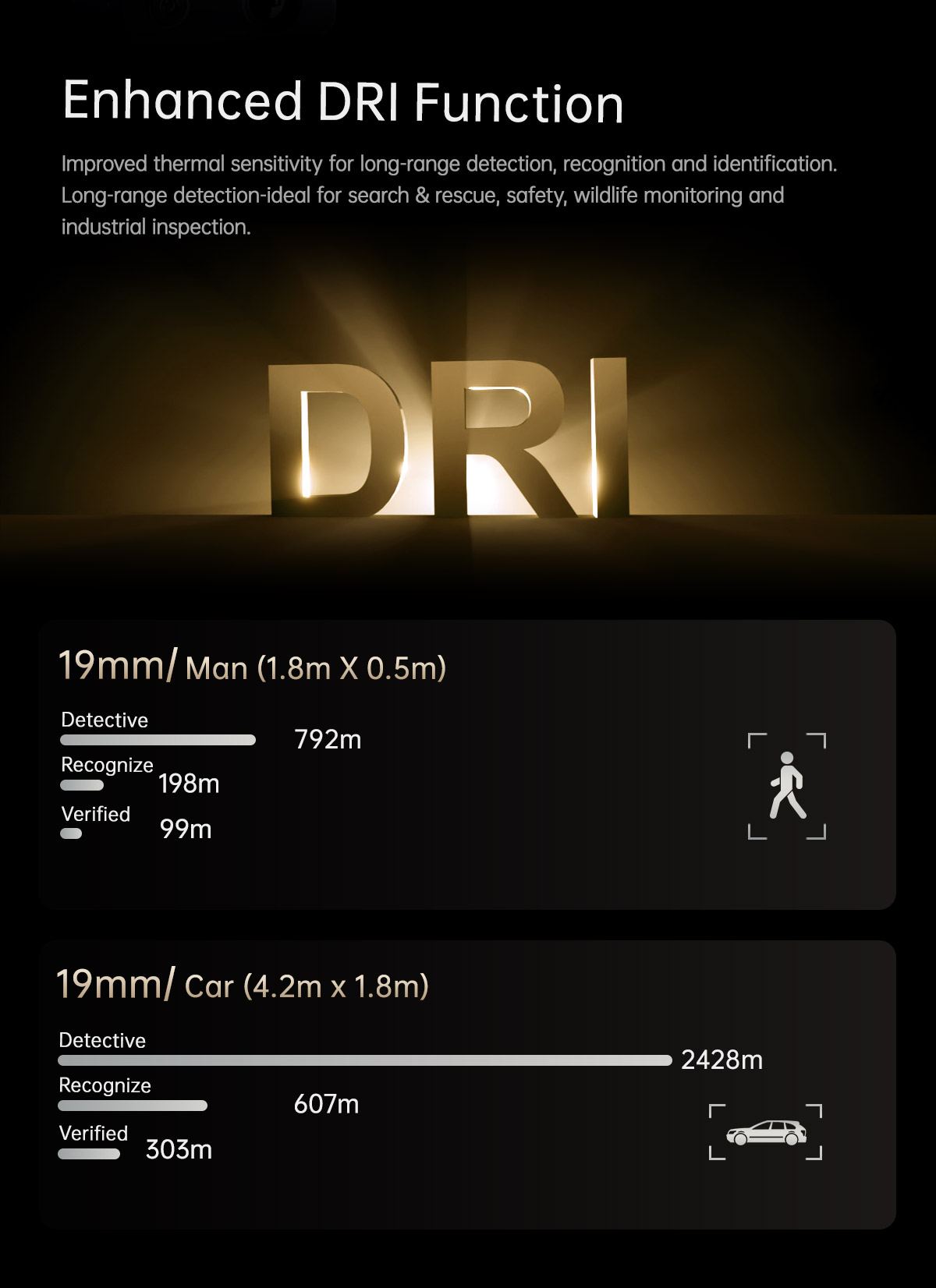
| Detective Distance (Man: 1.8×0.5m) | 1042 meters |
| Recognize Distance (Man: 1.8×0.5m) | 260 meters |
| Identification Distance (Man: 1.8×0.5m) | 130 meters |
| Detective Distance (Car: 4.2×1.8m) | 3194 meters |
| Recognize Distance (Car: 4.2×1.8m) | 799 meters |
| Identification Distance (Car: 4.2×1.8m) | 399 meters |
| Working mode | Uncooled VOx long wave (8μm~14μm) thermal imager |
| Detector pixel | 640*512 |
| Pixel size | 12μm |
| Focusing method | Athermal prime lens |
| NETD | ≤50mK@F1.0 @25℃ |
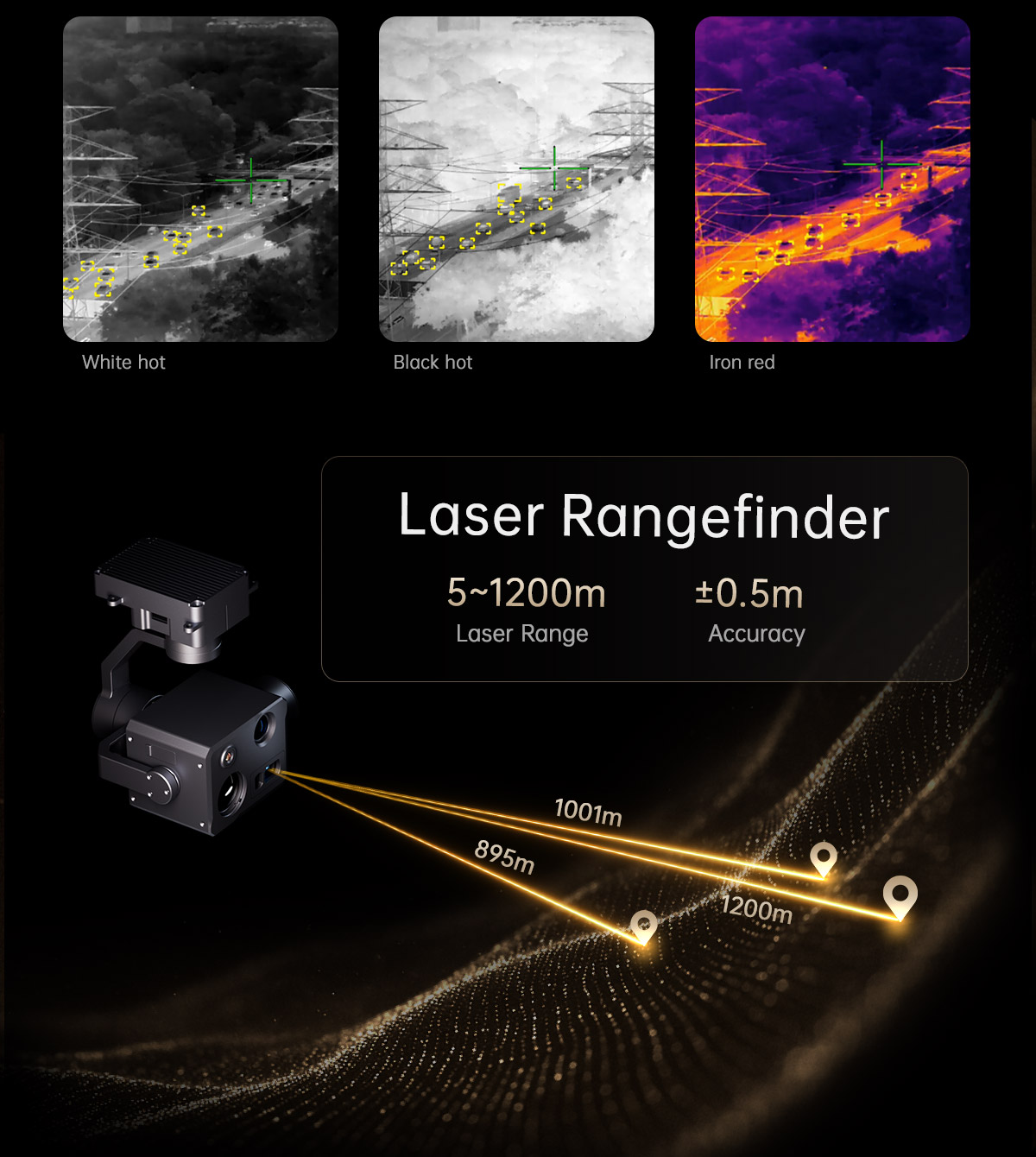
| Color palette | White hot,black hot,Iron red |
| Digital zoom | 1x~8x |
| Radiometric function(Optional) | Optional range -20℃~+150℃, +100℃~+650℃ |
| Temperature measurement accuracy ±3℃ or ±3%(take larger value) |
| Update rate of deviation pixel | 30Hz |
|---|---|
| Output delay of deviation pixel | <30ms |
| Minimum object contrast | 5% |
| Minimum signal-to-noise ratio | 4 |
| Minimum object size | 16*16 pixel |
| Maximum object size | 256*256 pixel |
| Tracking speed (Car) | ±48 pixel/frame |
| Object memory time | 100 frames |
| Targets type | Car and human |
|---|---|
| Simultaneous detection quantity | ≥ 10 targets |
| Min contrast ratio | 5% |
| Min target size | 5×5 pixel |
| Car detection rate | ≥85% |
| False alarm rate | ≤10% |
| Range | 5~1200m |
|---|---|
| Accuracy | ±1m |
| Frequency | 1~20Hz(5 40m);1~4Hz(40~1200m) |
| Light Beam | 905±5nm pulse laser |
| Divergent Angle | ~6 mrad |
| Location Resolving | Latitude and longitude of target |
| Rangefinder | Measure the distance between the object at the center of screen and the laser rangefinder |
| Eye safety level | Class 3R(IEC 60825-1) |
| Working power | ≤1.5W |
| OSD | Display the gimbal’s yaw and pitch angle, magnification, ranging value, TF card status, aircraft GPS and altitude, target ranging point GPS and altitude, date and time |
|---|---|
| Geotagging (POS) | Display time and GPS coordinate in picture exif |
| Card reading online | HTTP read pictures or videos |
| KLV (UDP) | Card recording or Viewlink video playback |
| ArduPilot / PX4 |
Support(Mavlink protocol ) Optional: Support Ardupilot Follow me feature |
| Video stitching | EO+IR /IR+EO /EO /IR |
| Dual-channel video stream output (optional) | Support (one EO output, one IR output, video recording is not supported after it is enabled) |
Product Details